Leo Joskowicz: Mechanical CAD
School of Engineering and Computer Science
The Hebrew University of Jerusalem, Israel
Computer-Aided Mechanical Assembly Design
Participants
| Prof. Leo Joskowicz |
School of Engineering and Computer Science, The Hebrew University of Jerusalem |
| Prof. Elisha Sacks |
Department of Computer Science, Purdue University, USA |
| Ralf Schultheiss |
Ford Motor Company, Koln, Germany. |
| Dr. Uwe Hinze |
Ford Motor Company, Koln, Germany. |
| Min-ho Kyung |
Purdue University, USA. |
| Dr. Ku-Jin Kim |
Ajou University, South Korea. |
Students
This research is part of the
Geometric Modelling and Computer Graphics Laboratory , the
Computer Aided Design Laboratory , and the Visualization Center, Purdue University, USA.
Goals
We have been developing over the past ten years the configuration space
paradigm for rigid-body contact analysis and computer-aided mechanical
systems design. Contact analysis is a fundamental problem because it is an
ubiquitous prerequisite in many tasks in robotics, mechanical design,
manufacturing, and computer graphics.
We have shown that configuration space, which dates back to the past century, is
a paradigm for major advances in computer-aided mechanical design because
it is a systematic and comprehensive computational framework within which
practical contact analysis and mechanical systems design tasks can be
automated for many applications. It improves upon previous work in
mechanical engineering and robotics by automating unexpected contact change
analysis, and upon previous work in computational geometry and motion
planning by providing algorithms that handle curved geometry, many moving
parts, and well-defined classes of useful mechanical systems.
Our current research focuses on:
- Tolerance envelope computation of parametric parts
- Kinematic tolerance synthesis
- Parametric design of mechanical systems
- Spatial fixed-axes mechanism analysis
- "Tolerance envelopes of parametric planar part models"
Y. Berman and L. Joskowicz
Proc. of the 8th CIRP Seminar on Computer-Aided Tolerancing,
Charlotte, NC, USA, April 2003, pp 102--108.
Abstract
PDF
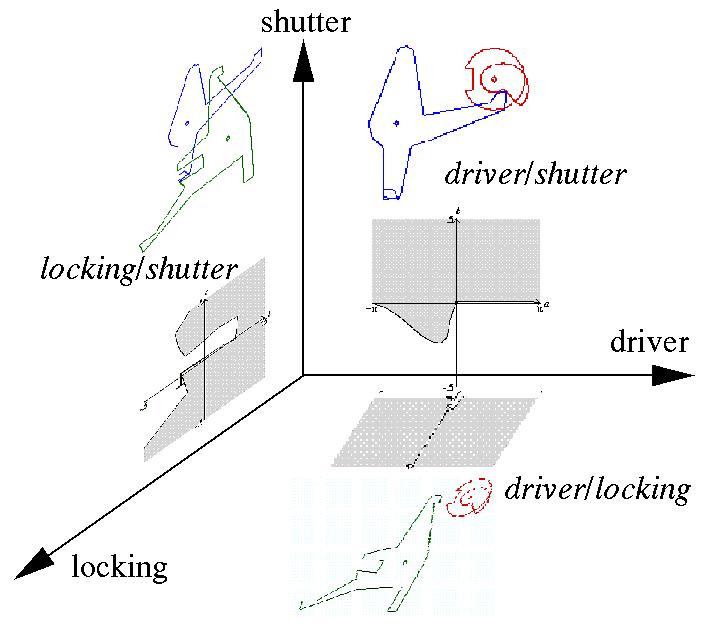
- "Kinematic analysis of spatial fixed-axes higher pairs using
configuration spaces"
K-J. Kim, E.Sacks, L. Joskowicz
Computer-Aided Design, Vol. 35(3) 2003, pp. 279-291.
Abstract
PDF
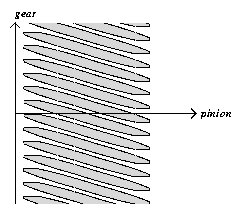
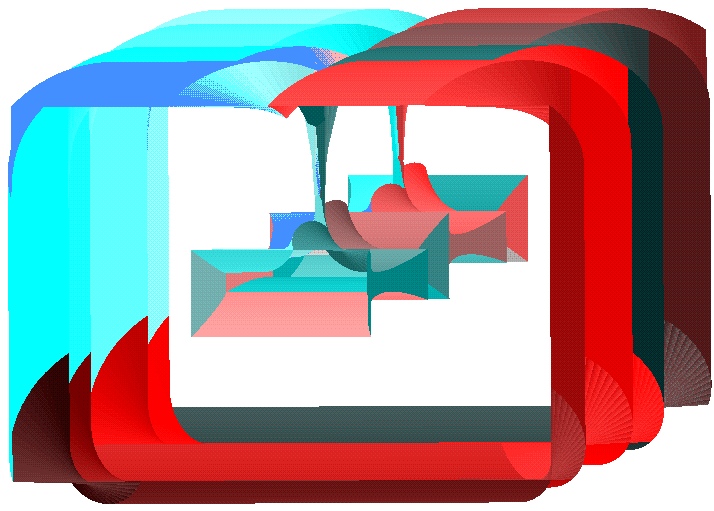
- "Redesign of a spatial gear pair using configuration spaces"
E. Sacks, L. Joskowicz, R. Schultheiss, and U. Hinze
Proc. of the ASME Design Engineering Technical Conferences ,
Montreal, Canada, September 2002.
Abstract
PDF
- "Robust kinematic synthesis of mechanical systems"
E. Sacks, L. Joskowicz, and R. Schultheiss
Proc. the American Society for Precision Engineering.
Topical meeting: Tolerance Modeling and Analysis,
North Carolina, USA, 2002 and Proc. of the Int. Symp. on Multibody Systems and
Mechatronics, Mexico City, Sept. 2002, pp. 345-356.
Abstract
PDF
- "Kinematic synthesis"
M. McCarthy and L. Joskowicz
Chapter in the book Formal Engineering Design Synthesis
E.K. Antonsson and J. Cagan editors, Cambridge University Press, 2001, pp. 321-362,
ISBN 0-521-79247-9.
Funding
- "Vision based active robot navigation", (with I. Shimshoni, Technion,
and R. Basri, Weizmann Institute), Ministry of Science, 4/2000-4/2003.
-
"Computer-aided contact analysis and mechanical system design using configuration
spaces", (with Prof. E. Sacks, Purdue) Israel Academy of Sciences, Grant 98/536,
10/1998-10/2001.
-
"Automatic allocation of functional tolerances and quantification of robustness"
(with Prof E. Sacks, Purdue) Ford University Research Grant, 10/1998-10/1999.
- Prof. Sacks is also supported by NSF grants CCR-9617600 and CCR-9505745 and
by the Purdue Center for Computational Image Analysis and Scientific
Visualization.
![[Back]](arrow2.gif) Back to Home Page
Back to Home Page
Last modified: November 15, 2003.